OPENVIO使用说明
简介
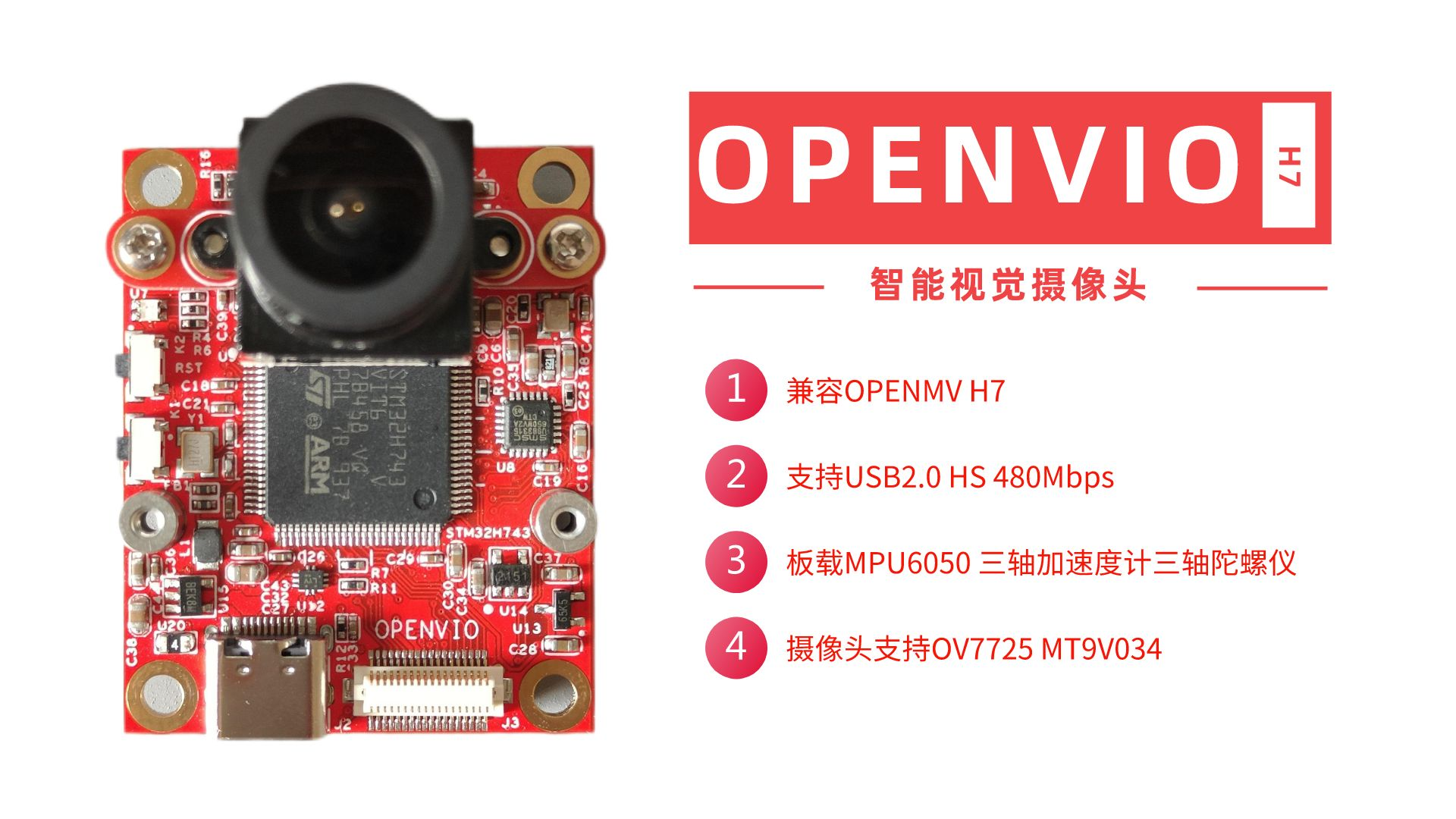
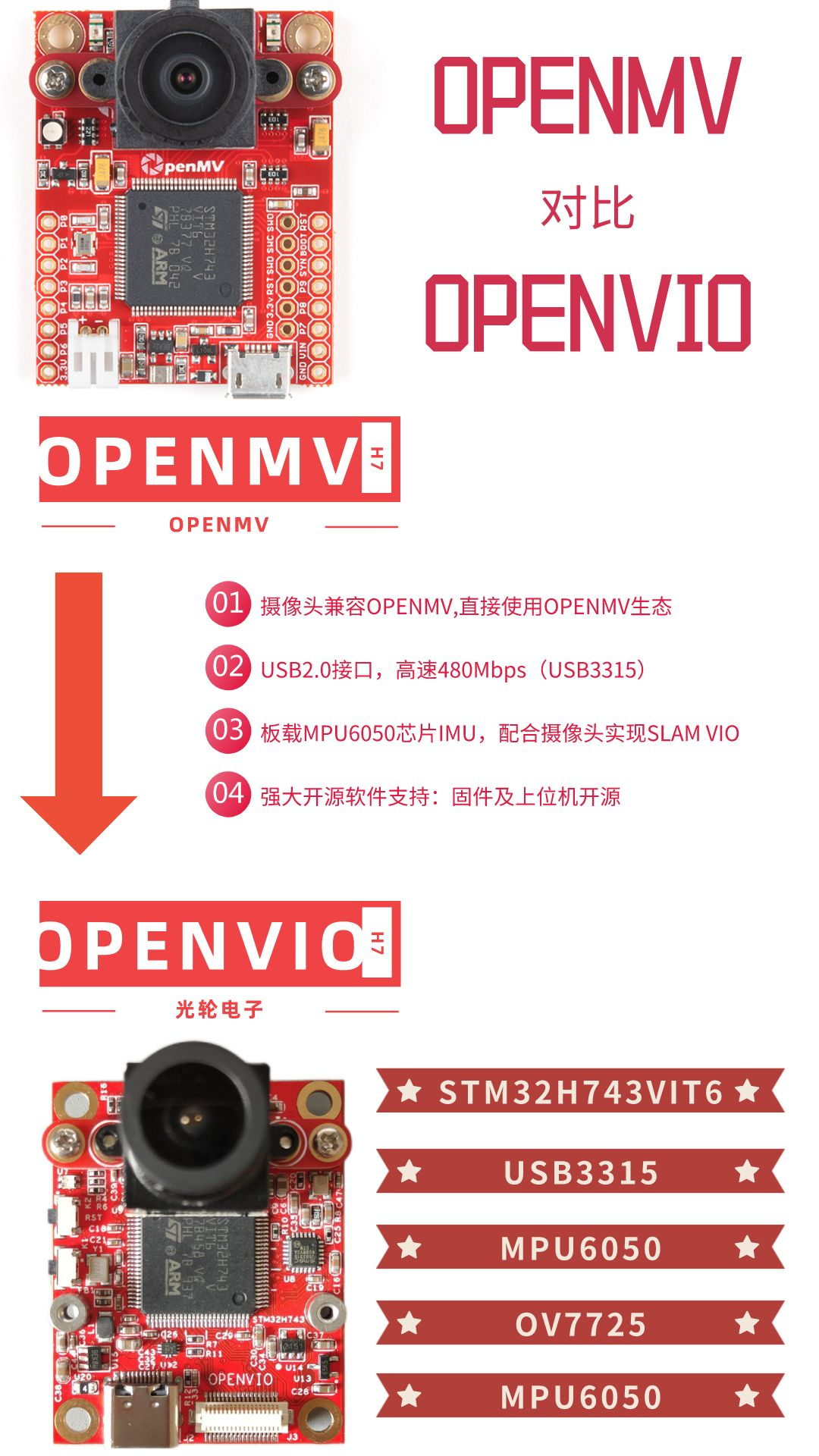
OPENVIO 一款脱胎于OPENMV的智能摄像头。
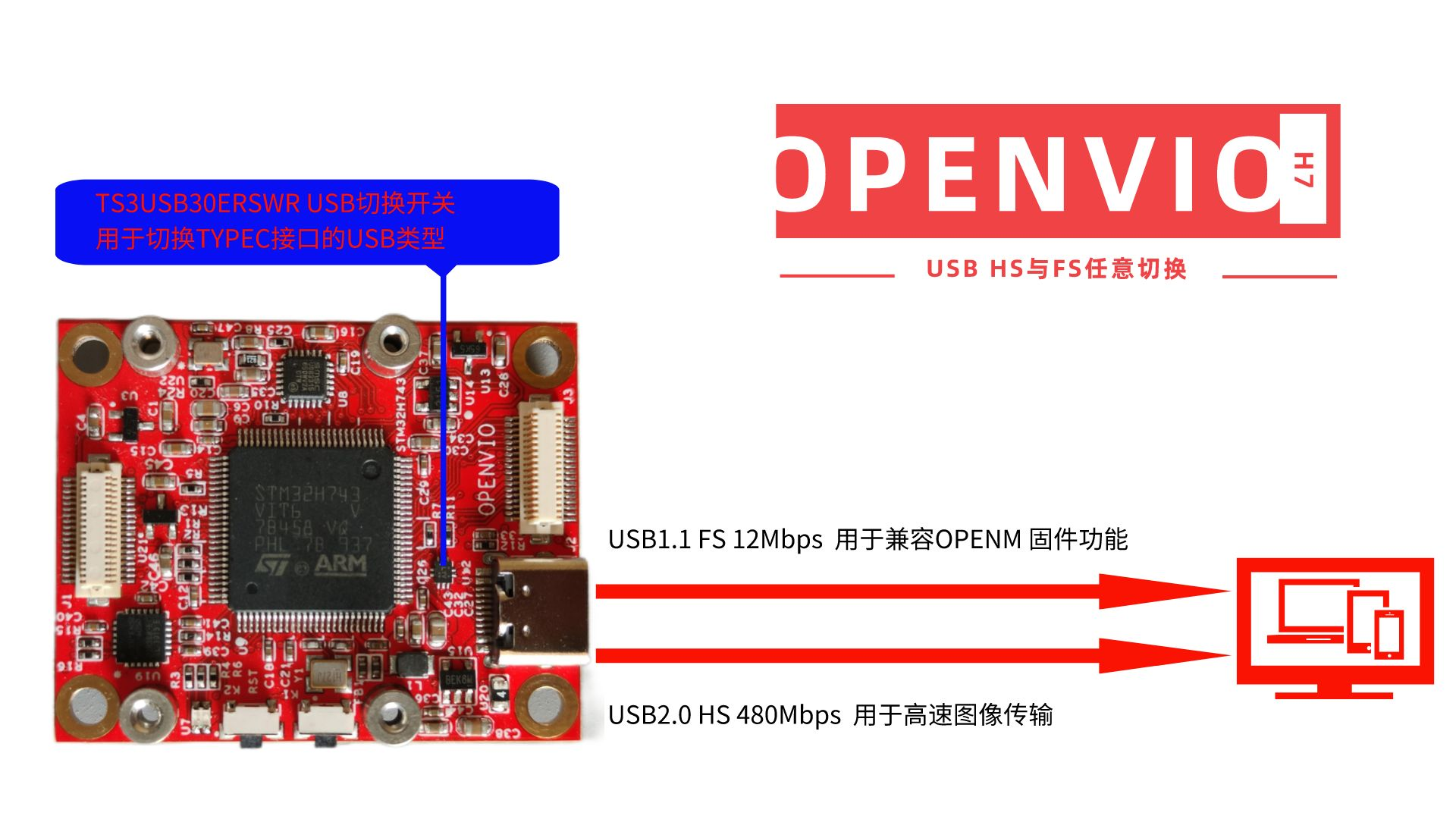
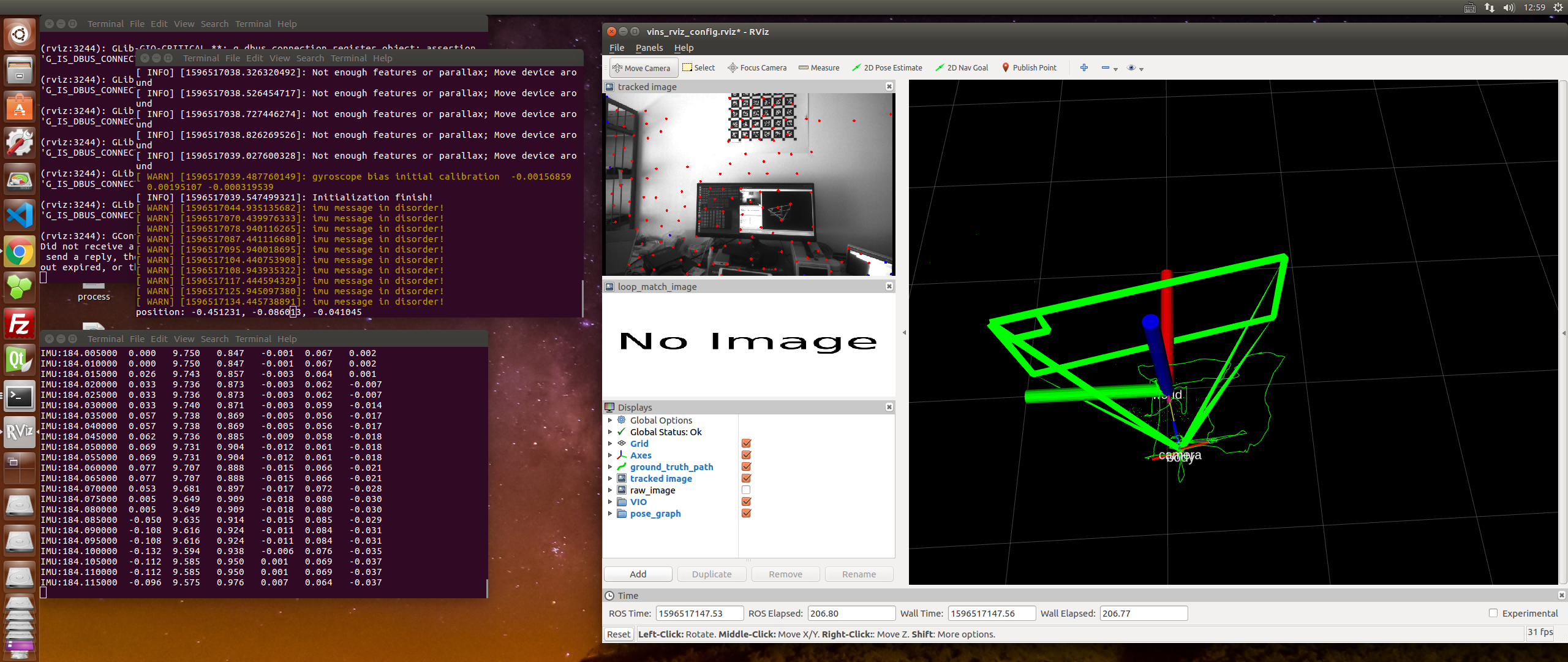
在OPENMV硬件基础上增加了USB2.0芯片(USB3315)和IMU芯片(MPU6050),除却兼容OPENMV固件外,还可以将摄像头原始图像(未压缩图像)和IMU九轴数据高速传输至PC,可以作为SLAM单目IMU方案研究的低廉传感器方案(如港科大的VINS-MONO)。
OPENVIO摄像头用在GLMocap项目上实现了多目视觉运动捕捉功能。
多种接口方便扩展更多功能,比如扩展超声波或激光模块后作为PX4光流模块使用(暂未实现 还在研发中)。
源码和资料
基础源码(OV7725 MT9V034 MPU6050 LCD USB)
OPENVIO源码(github)【开发环境:Keil5】
OPENVIO PC上位机(github)【开发环境:QT5.6.0 qt-opensource-windows-x86-mingw492-5.6.0】
新架构OPENVIO源码用于GLMocap视觉动捕项目
新架构OPENVIO 上位机源码(github)【详情查阅GLMocap项目】
新架构OPENVIO-APP源码(github)【开发环境:Vscode Makefile】
新架构OPENVIO-BOOTLOADER源码(github)【开发环境:Vscode Makefile】
新架构OPENVIO-APP源码(gitee)【开发环境:Vscode Makefile】
新架构OPENVIO-BOOTLOADER源码(gitee)【开发环境:Vscode Makefile】
OPENVIO原理图
购买访问
与OPENMV固件兼容性说明
可以直接刷入OPENMV H7的官方固件使用,也就是说,摄像头的功能皆兼容。但是由于扩展接口不同,所以不对官方固件做兼容。
| 三色LED | OV7725 | MT9V034 | 其他模块 |
|---|---|---|---|
| 仅兼容一颗 | 兼容 | 兼容 | 不兼容 |
功能及研发进度
| 功能 | 进度 |
|---|---|
| OPENMV两款摄像头兼容 | 已完成 |
| SLAM VIO 单目IMU传感器功能 | 已完成 |
| 港科大VINS-MONO | 已完成 |
| PC上位机 | 已完成 |
| 小Demo | 已完成 |
| PX4光流 | 正在研发 |
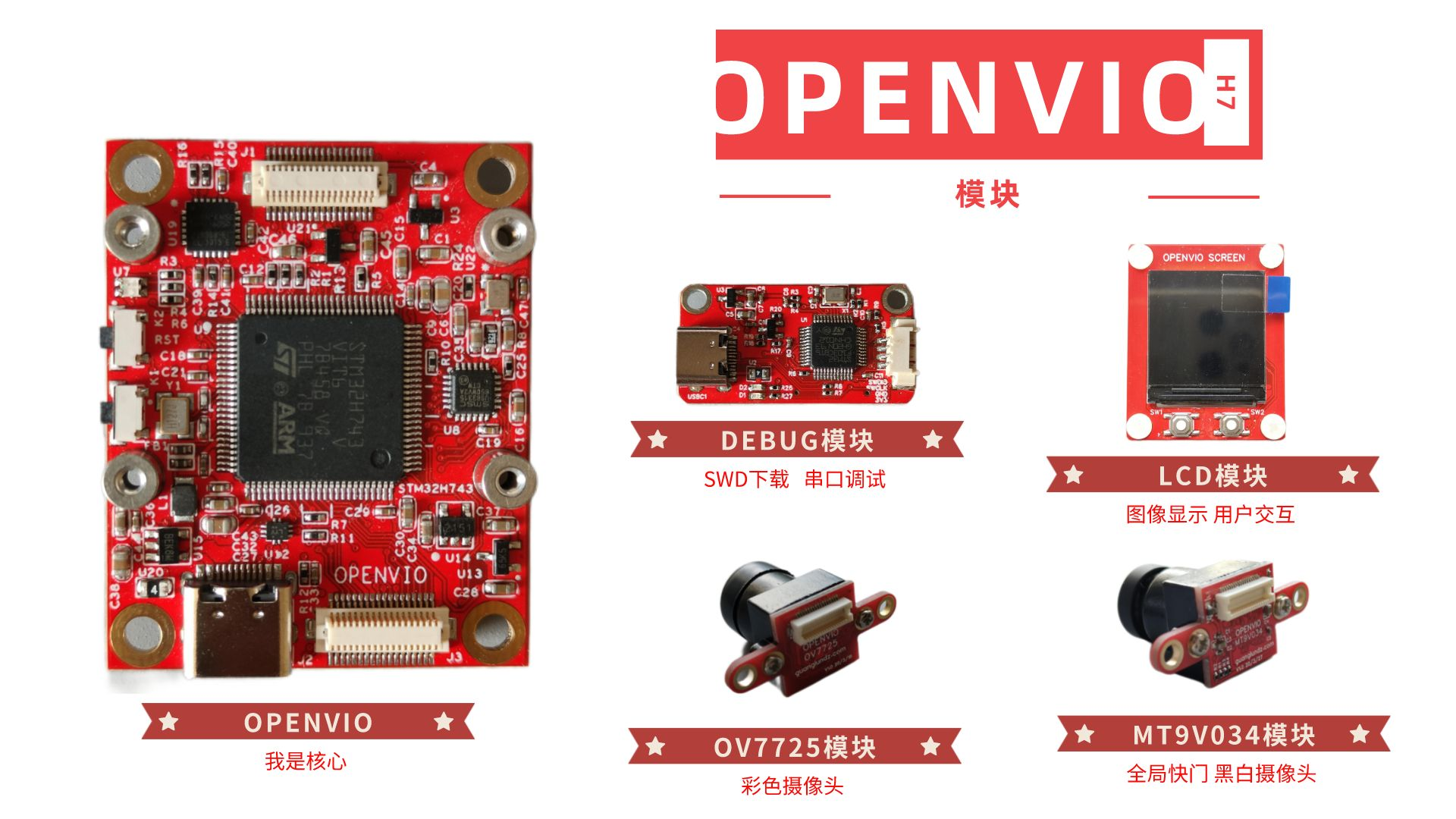
已有模块及正在研发模块
| 模块 | 进度 |
|---|---|
| OV7725 | 已完成 |
| MT9V034 | 已完成 |
| 下载调试器模块 | 已完成 |
| 正面彩屏模块 | 取消研发 |
| 背面彩屏模块 | 已完成 |
| 背面彩屏及锂电源模块 | 择机研发 |
| 超声波模块 | 取消研发 |
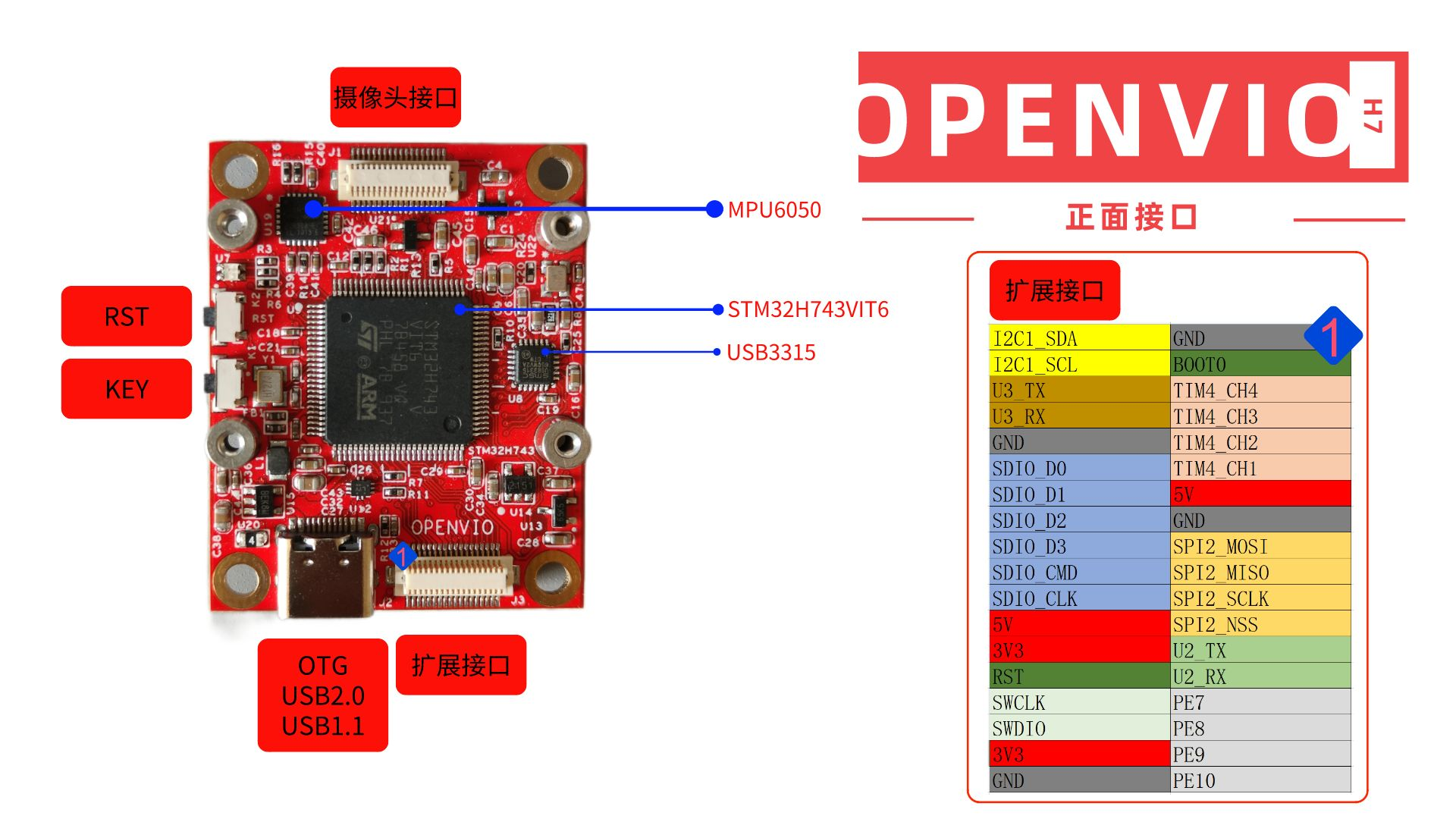
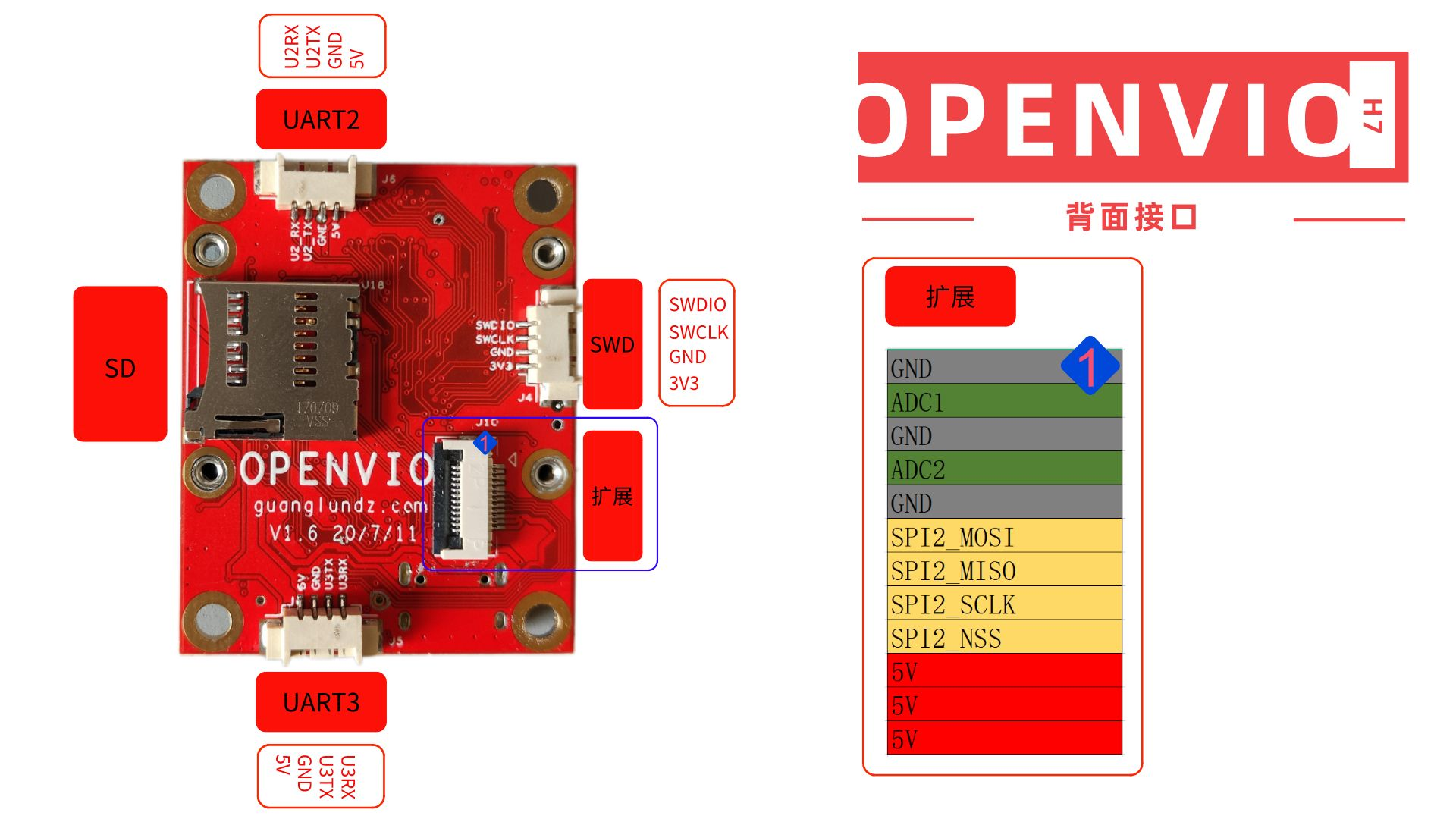
接口
USB HS FS 切换
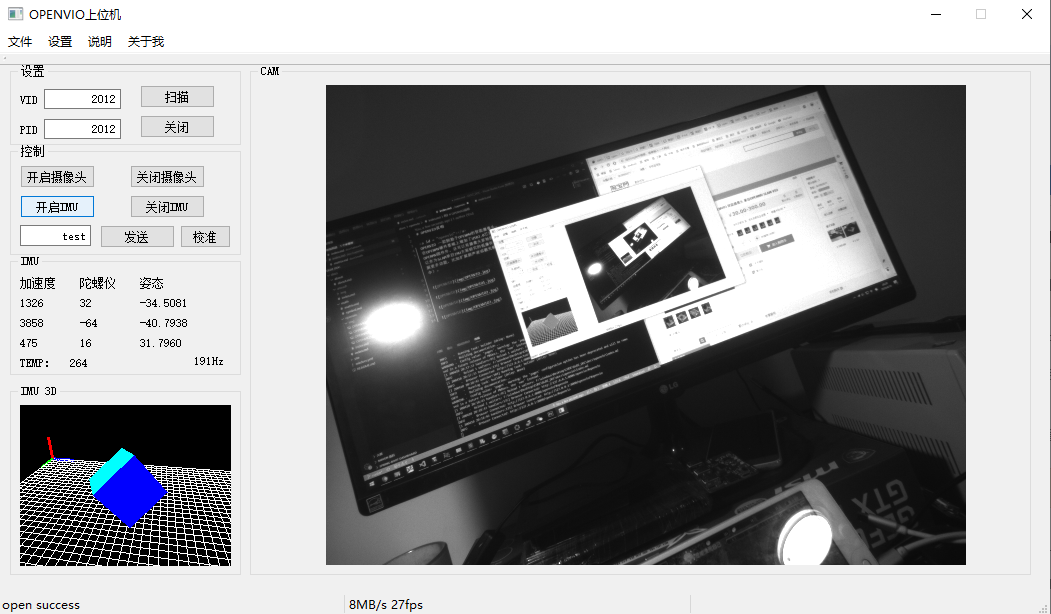
PC上位机(基础版本)
VINS-Mono
图片
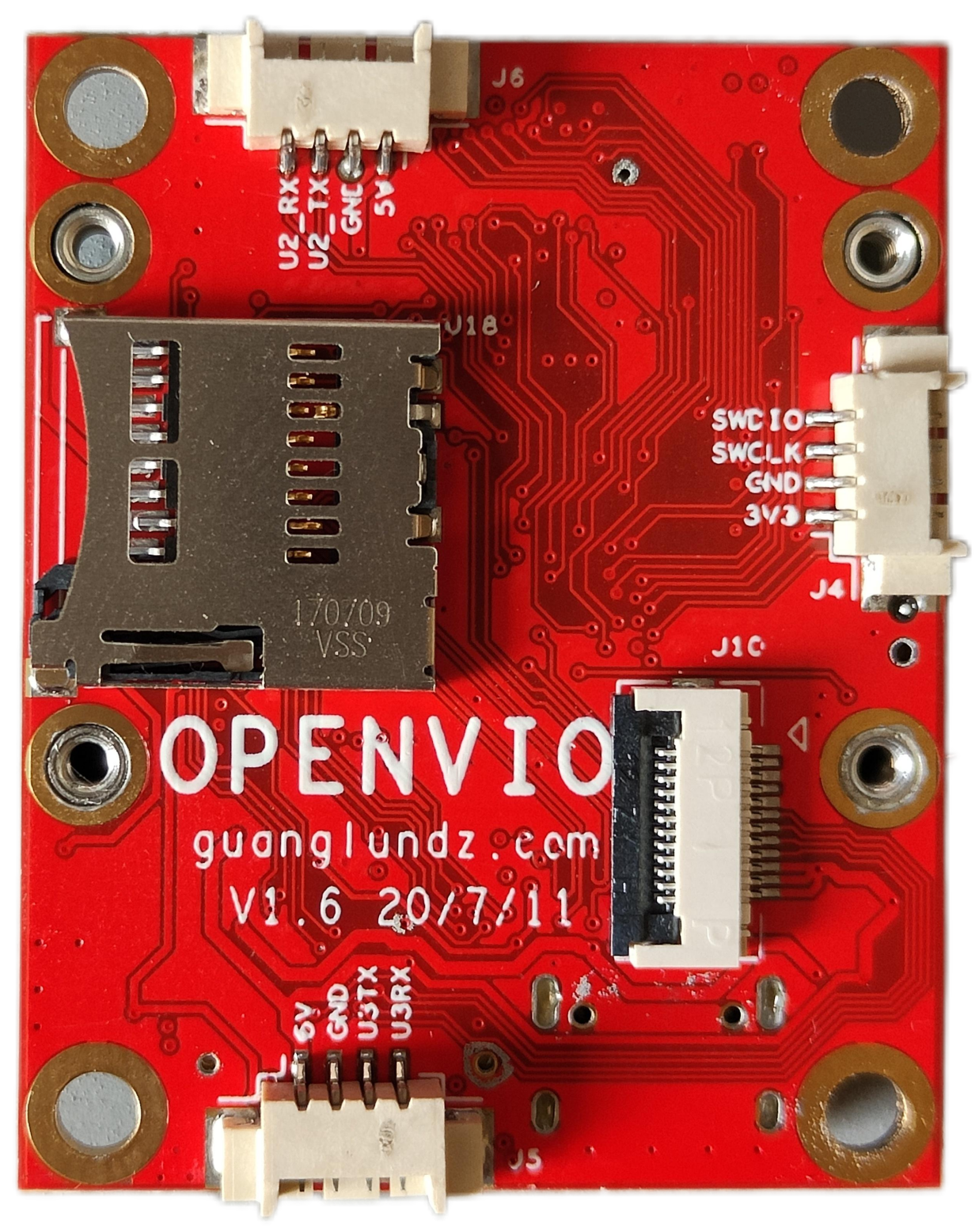
OPENVIO V1.6 正面
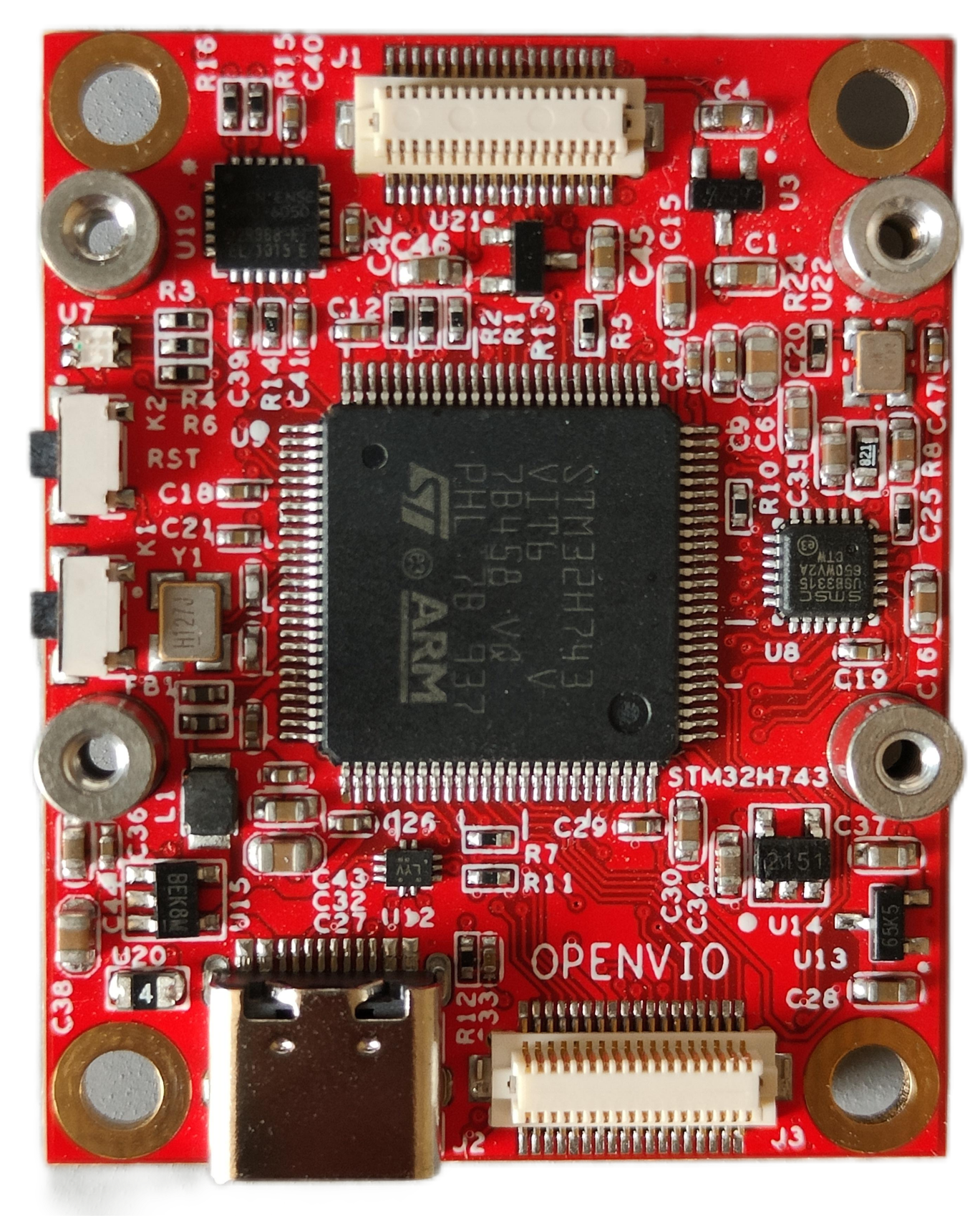
OPENVIO V1.6 背面